Stevens Researcher Long Wang Advances Robotic Hand Technology for Combat Casualty Care

With the development of a robotic “hand” designed to safely assist with care in emergency casualty situations, Long Wang, assistant professor in the Department of Mechanical Engineering at Stevens Institute of Technology, is literally giving medicine a helping hand.
Following a successful six-month Phase I effort, the Robotic End-Effector for Combat Casualty Care project has received additional funding from the U.S. Department of Defense Small Business Innovation Research (SBIR) program.
 For 24 months, Wang and his team will build and test a working prototype of a specialized mechanical hand to allow a robot to safely interact with patients and medical tools. Wang’s work is part of a $1.3 million project led by Corvid Technologies as the prime recipient.
For 24 months, Wang and his team will build and test a working prototype of a specialized mechanical hand to allow a robot to safely interact with patients and medical tools. Wang’s work is part of a $1.3 million project led by Corvid Technologies as the prime recipient.
The initiative combines university research and industry engineering expertise in robotics and physical human-robot interactions. Mechanical engineering students involved in the project include Ph.D. candidates Qianwen Zhao, Aldrin Padua and Srikarran Sowrirajan; graduate students Nicholas Mattos ‘26 and Daniel Rodrigues de Souza ‘26; and undergraduate Julianna Fischetti ’28.
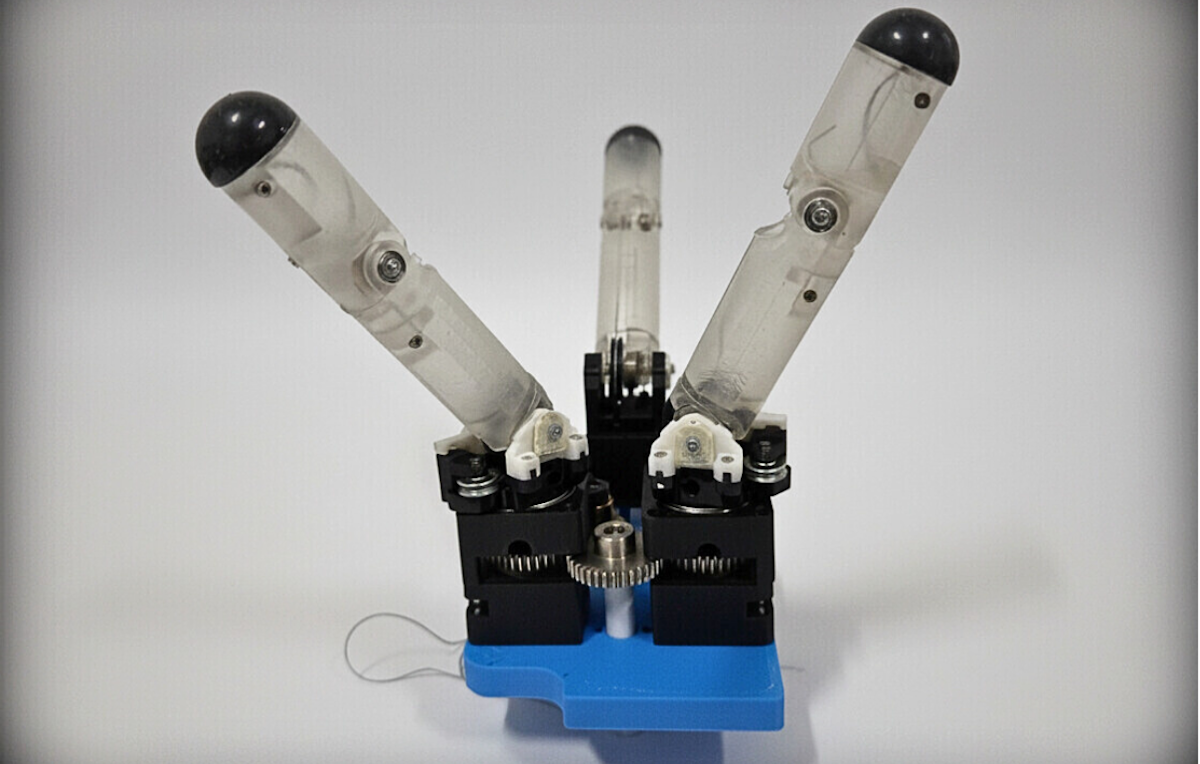
While many robotic grippers have been designed for industrial tasks, this device is intended strictly for medical environments, primarily caring for casualties in combat situations. The goal is to enable robotic systems to help medics in challenging environments complete tasks such as repositioning an injured limb, placing monitoring devices, positioning an ultrasound probe for trauma screening and handling emergency procedure tools.
“Industrial robot hands are excellent at gripping rigid objects, but medicine involves living patients with a variety of physical structures,” Wang explained. “Our engineering challenge is to design robotic tool that can match the performance range of a medic’s hand to provide strong, steady, high-strength support and fine dexterity for precise, slip-free manipulation.”
Taking matters in hand
 During Phase I, the team’s simulation-based, task-driven design and evaluation approach addressed safety and performance to guide the initial design. Using a biomechanically accurate digital human model, the researchers demonstrated how the robot would work with patients and medical tools. The results of that analysis helped identify risks and optimize the design.
During Phase I, the team’s simulation-based, task-driven design and evaluation approach addressed safety and performance to guide the initial design. Using a biomechanically accurate digital human model, the researchers demonstrated how the robot would work with patients and medical tools. The results of that analysis helped identify risks and optimize the design.
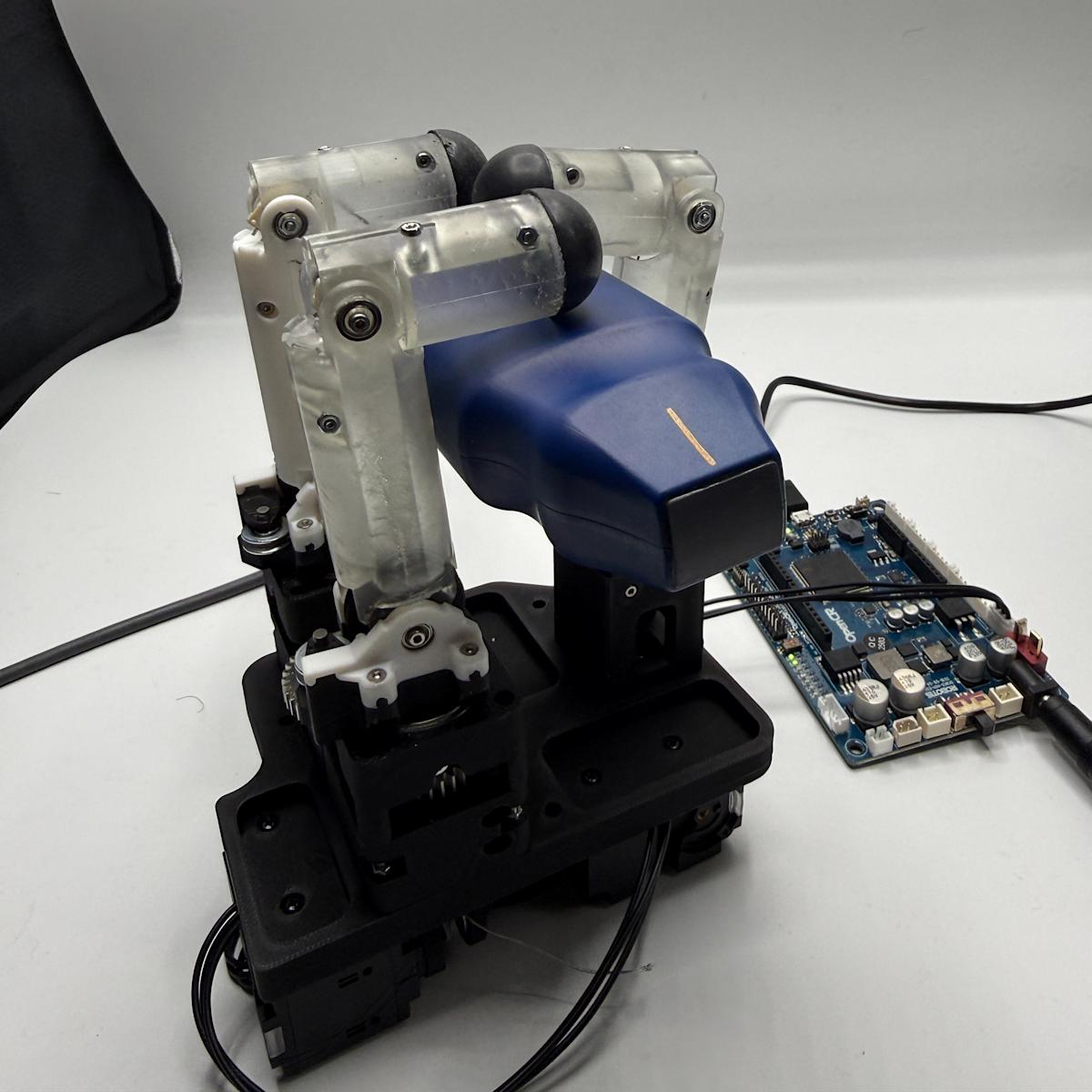
The resulting peer-reviewed paper in the ASME Journal of Mechanical Design, with Zhao as lead author, serves as the foundation for Phase II, which involves fabrication and integration. The team will build the device, mount it on an articulated robotic system and demonstrate representative casualty-care tasks using medical manikins and task trainers.
“We’re asking what it will take to reliably use this technology when lives are on the line,” Wang said. “For example, we can study how a design may behave when lifting and repositioning a limb, placing a pulse oximeter on a finger, maneuvering an ultrasound probe across the torso or handling tools such as a catheter for needle decompression and a scalpel for surgery.”
Phase II also focuses on early planning for commercialization and regulatory pathways.
“Designing with that real-life translation in mind changes the engineering conversation in a very real way,” Wang noted. “Requirements such as sterilization that are easy to overlook in a pure prototype mindset can significantly reshape design practices and trade-offs.”
The future of care is in good hands
While this robotic hand technology is being developed to meet the demands of battlefield care, it also shows promise for civilian emergency and acute-care settings, especially in hospitals facing constrained resources.
By automating elements of assessment, decision-making and lifesaving intervention, this innovative approach could extend the reach of medical teams and support safer, more effective human-robot collaboration in military and civilian contexts alike.
Learn more about academic programs and research in the Department of Mechanical Engineering:

